Ongle magnitude vectorielle est toute expression représentée par un vecteur qui a une valeur numérique (module), une direction, une direction et un point d'application. Quelques exemples de grandeurs vectorielles sont le déplacement, la vitesse, la force et le champ électrique.
La représentation graphique d'une grandeur vectorielle est constituée d'une flèche dont la pointe indique sa direction et sa direction, sa longueur est le module et le point de départ est l'origine ou le point d'application..
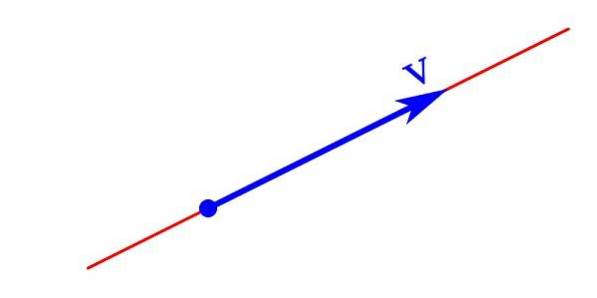
La quantité vectorielle est représentée analytiquement par une lettre avec une flèche en haut pointant vers la droite dans une direction horizontale. Il peut également être représenté par une lettre écrite en gras V dont le module ǀVǀ est écrit en italique V.
L'une des applications du concept de grandeur vectorielle est dans la conception des autoroutes et des routes, en particulier dans la conception de leurs courbures. Une autre application est le calcul du déplacement entre deux endroits ou le changement de vitesse d'un véhicule.
Index des articles
Une grandeur vectorielle est toute entité représentée par un segment de ligne, orienté dans l'espace, qui a les caractéristiques d'un vecteur. Ces caractéristiques sont:
Module: C'est la valeur numérique qui indique la taille ou l'intensité de la grandeur vectorielle.
adresse: C'est l'orientation du segment de ligne dans l'espace qui le contient. Le vecteur peut avoir une direction horizontale, verticale ou inclinée; nord, sud, est ou ouest; nord-est, sud-est, sud-ouest ou nord-ouest.
Sens: Indiqué par la pointe de flèche à la fin du vecteur.
Point d'application: C'est l'origine ou le point d'actionnement initial du vecteur.
Les vecteurs sont classés comme colinéaires, parallèles, perpendiculaires, simultanés, coplanaires, libres, glissants, opposés, à objectif d'équipe, fixes et unitaires..
Colinéaire: Ils appartiennent ou agissent sur la même ligne droite, ils sont aussi appelés dépendant linéairement et peut être vertical, horizontal et incliné.
Parallèle: Ils ont la même direction ou inclinaison.
Perpendiculaire: deux vecteurs sont perpendiculaires l'un à l'autre lorsque l'angle entre eux est de 90 °.
Concurrent: Ce sont des vecteurs qui, lorsqu'ils glissent le long de leur ligne d'action, coïncident au même point dans l'espace.
Coplanaires: Ils agissent sur un avion, par exemple l'avion xy.
Libérer: Ils se déplacent à n'importe quel point de l'espace, en gardant leur module, leur direction et leur sens.
Curseurs: Ils se déplacent le long de la ligne d'action déterminée par leur direction.
Les opposés: Ils ont le même module et la même direction, et la direction opposée.
Teamlenses: Ils ont le même module, la même direction et le même sens.
Fixé: Ils ont le point d'application invariable.
Unitaire: Vecteurs dont le module est l'unité.
Une quantité vectorielle dans un espace tridimensionnel est représentée dans un système de trois axes mutuellement perpendiculaires (X y Z) appelé trièdre orthogonal.
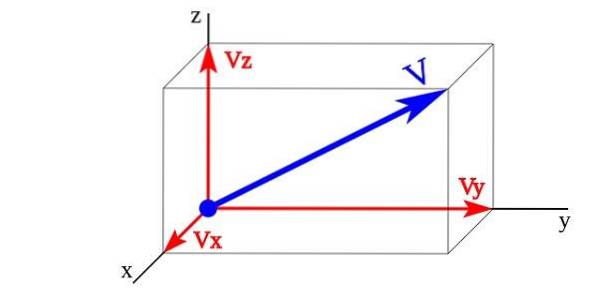
Dans l'image les vecteurs Vx, Vy, Vz sont les composantes vectorielles du vecteur V dont les vecteurs unitaires sont X,Oui,z. La magnitude vectorielle V est représenté par la somme de ses composantes vectorielles.
V = Vx + Vy + Vz
La résultante de plusieurs quantités vectorielles est la somme vectorielle de tous les vecteurs et remplace ces vecteurs dans un système.
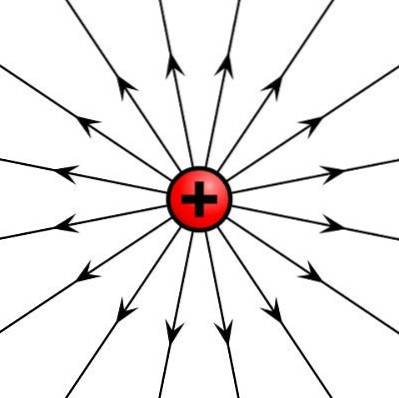
Le champ vectoriel est la région de l'espace dans laquelle une grandeur vectorielle correspond à chacun de ses points. Si la grandeur qui se manifeste est une force agissant sur un corps ou un système physique, alors le champ vectoriel est un champ de forces.
Le champ vectoriel est représenté graphiquement par des lignes de champ qui sont des lignes tangentes de la grandeur vectorielle à tous les points de la région. Quelques exemples de champs vectoriels sont le champ électrique créé par une charge électrique ponctuelle dans l'espace et le champ de vitesse d'un fluide.
Ajout de vecteurs: C'est la résultante de deux vecteurs ou plus. Si nous avons deux vecteurs OU ALORS Oui P la somme est OU ALORS + P = Q. Le vecteur Q est le vecteur résultant obtenu graphiquement en traduisant l'origine du vecteur À à la fin du vecteur B.
Soustraction vectorielle: La soustraction de deux vecteurs O et P c'est OU ALORS - P = Q. Le vecteur Q s'obtient en ajoutant au vecteur OU ALORS c'est en face -P. La méthode graphique est la même que la somme à la différence que le vecteur opposé est transféré à l'extrême.
Produit scalaire: Le produit d'une quantité scalaire à par une grandeur vectorielle P c'est un vecteur mP qui a la même direction du vecteur P. Si la magnitude scalaire est nulle, le produit scalaire est un vecteur nul.
La position d'un objet ou d'une particule par rapport à un système de référence est un vecteur qui est donné par ses coordonnées rectangulaires X y Z, et est représenté par ses composantes vectorielles xî, etĵ, zk. Vecteurs je, ĵ, k ce sont des vecteurs unitaires.
Une particule en un point (X y Z) a un vecteur de position r = xî + etĵ + zk. La valeur numérique du vecteur de position est r= √ (Xdeux + Ouideux + zdeux). Le changement de position de la particule d'une position à une autre par rapport à un référentiel est le vecteur Déplacement Δr et est calculé avec l'expression vectorielle suivante:
Δr = rdeux - r1
Accélération moyenne (àm) est défini comme le changement de vitesse v dans un intervalle de temps Δt et l'expression pour le calculer est àm= Δv / Δt, étant Δv le vecteur de changement de vitesse.
Accélération instantanée (à) est la limite de l'accélération moyenne àm lorsque Δt il devient si petit qu'il tend vers zéro. L'accélération instantanée est exprimée en fonction de ses composantes vectorielles
à =àXje +àOui ĵ+ àzk
La force d'attraction gravitationnelle exercée par une masse M, situé à l'origine, sur une autre masse m en un point de l'espace X, Oui, z est un champ vectoriel appelé champ de force gravitationnelle. Cette force est donnée par l'expression:
F= (- mMG /r)ȓ
r = xî + etĵ + zk
F = est la force gravitationnelle de magnitude physique
G = est la constante de gravitation universelle
ȓ = est le vecteur de position de la masse m



Personne n'a encore commenté ce post.