
le moment d'inertie d'un corps rigide par rapport à un certain axe de rotation, représente sa résistance au changement de sa vitesse angulaire autour dudit axe. Il est proportionnel à la masse et aussi à l'emplacement de l'axe de rotation, puisque le corps, selon sa géométrie, peut tourner plus facilement autour de certains axes que dans d'autres.
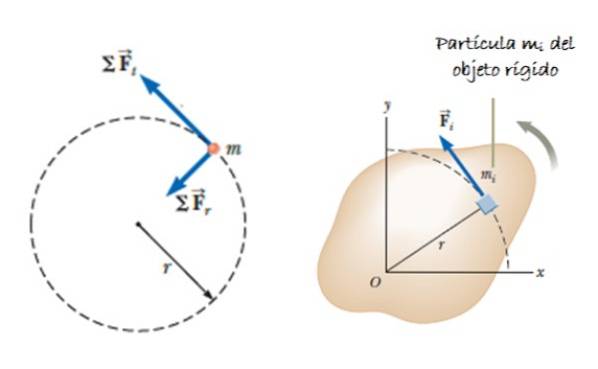
Supposons un grand objet (composé de nombreuses particules) qui peut tourner autour d'un axe. Supposons qu'une force agisse F, appliqué tangentiellement sur la masse élémentaire Δmje, qui produit un couple ou un moment, donné par τrapporter = ∑rje X Fje. Le vecteur rje est la position de Δmje (voir figure 2).

Ce moment est perpendiculaire au plan de rotation (direction +k = sortant du papier). La force et le vecteur de position radiale étant toujours perpendiculaires, le produit croisé reste:
τrapporter = ∑ Fje rje k = ∑ (Δmje àje) rje k = ∑ Δmje (àje rje ) k
Accélération àje représente la composante tangentielle de l'accélération, car l'accélération radiale ne contribue pas au couple. En fonction de l'accélération angulaire α, on peut indiquer que:
àje = α rje
Par conséquent, le couple net ressemble à ceci:
τrapporter = ∑ Δmje (α rjedeux) k = (∑ rjedeux Δmje) α k
L'accélération angulaire α est la même pour l'objet entier, donc elle n'est pas affectée par l'indice «i» et peut sortir de la sommation, qui est précisément le moment d'inertie de l'objet symbolisé par la lettre I:
I = ∑ rjedeux Δmje
C'est le moment d'inertie d'une distribution de masse discrète. Lorsque la distribution est continue, la sommation est remplacée par une intégrale et Δm devient un différentiel de masse dm. L'intégrale est réalisée sur l'ensemble de l'objet:
I = ∫M(rdeux) dm
Les unités du moment d'inertie dans le système international SI sont le kg x mdeux. C'est une grandeur scalaire et positive, puisqu'elle est le produit d'une masse et du carré d'une distance.
Index des articles
Un objet étendu, tel qu'une barre, un disque, une sphère ou autre, dont la densité ρ est constante et sachant que la densité est le rapport masse-volume, le différentiel de masse dm s'écrit:
ρ = dm / dV → dm = ρdV
En substituant dans l'intégrale le moment d'inertie, on a:
I = ∫rdeux ρdV = ρ ∫rdeuxdV
Il s'agit d'une expression générale, valable pour un objet tridimensionnel, dont le volume V et position r sont des fonctions des coordonnées spatiales X, Oui Oui z. Notez qu'étant constante, la densité est en dehors de l'intégrale.
La densité ρ On l'appelle aussi densité volumétrique, mais si l'objet est très plat, comme une feuille ou très fin et étroit comme une tige, d'autres formes de densité peuvent être utilisées, voyons:
- Pour une feuille très fine, la densité à utiliser est σ, la densité de surface (masse par unité de surface) et donne est le différentiel de surface.
- Et s'il s'agit d'une barre mince, où seule la longueur est pertinente, la densité de masse linéaire est utilisée λ et un différentiel de longueur, selon l'axe utilisé comme référence.
Dans les exemples suivants, tous les objets sont considérés comme rigides (non déformables) et ont une densité uniforme.
Nous allons calculer ici le moment d'inertie d'une barre mince, rigide et homogène de longueur L et de masse M, par rapport à un axe passant par le milieu.
Tout d'abord, il est nécessaire d'établir un système de coordonnées et de construire une figure avec la géométrie appropriée, comme ceci:
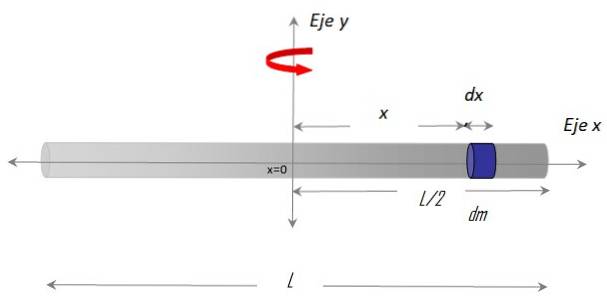
le Axe X le long du bar et le Axe y comme axe de rotation. La procédure d'établissement de l'intégrale nécessite également de choisir un différentiel de masse sur la barre, appelé dm, qui a une longueur différentielle dx et est situé à la position X arbitraire, par rapport au centre x = 0.
Selon la définition de la masse volumique linéaire λ:
λ = M / L
La densité étant uniforme, ce qui est valable pour M et L, elle est également valable pour dm et dx:
λ = dm / dx → dm = λdx.
En revanche, la masse élémentaire est dans la position X, puis en substituant cette géométrie dans la définition, on a une intégrale définie, dont les limites sont les extrémités de la barre selon le repère:
En remplaçant la densité linéaire λ = M / L:
Pour trouver le moment d'inertie de la barre par rapport à un autre axe de rotation, par exemple celui qui passe par l'un de ses extrêmes, vous pouvez utiliser le théorème de Steiner (voir exercice résolu à la fin) ou effectuer un calcul direct similaire à celui montré ici, mais en modifiant la géométrie de manière appropriée.
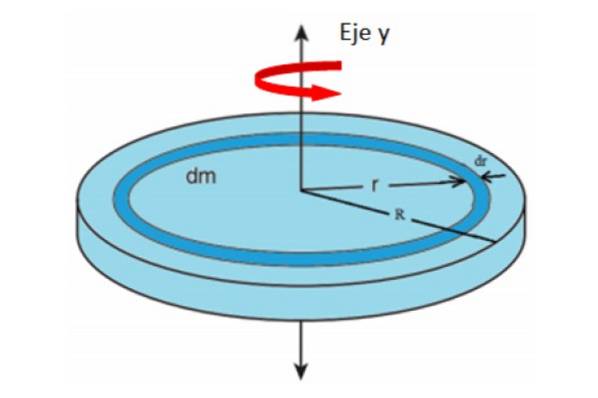
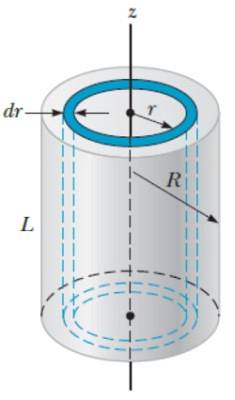
Un disque très mince d'épaisseur négligeable est une figure plate. Si la masse est uniformément répartie sur toute la surface de la zone A, la densité de masse σ est:
σ = M / Y
Tellement de dm Quoi donne correspondent à la masse et à la surface de la bague différentielle représentée sur la figure. Nous supposerons que l'ensemble de l'assemblage tourne autour de l'axe y.
Vous pouvez imaginer que le disque est composé de nombreux anneaux concentriques de rayon r, chacun avec son moment d'inertie respectif. Ajout des contributions de tous les anneaux jusqu'à atteindre le rayon R, le moment d'inertie total du disque sera.
σ = dm / dA → dm = σdonne
Où M représente la masse entière du disque. La surface d'un disque dépend de son rayon r comme:
A = π.rdeux
Dérivation par rapport à r:
dA / dr = 2 = 2π.r → dA = 2π.rdr
En remplaçant ce qui précède dans la définition de I:
En remplaçant σ = M / (π.Rdeux ) restes:
%5Cleft&space;(%5Cfrac%7BR%5E%7B4%7D%7D%7B4%7D&space;%5Cright&space;)=%5Cfrac%7B1%7D%7B2%7DMR%5E%7B2%7D)
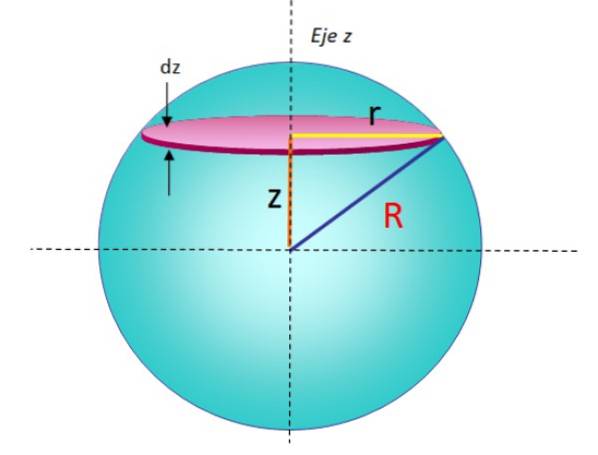
Une sphère de rayon R peut être considérée comme une série de disques empilés les uns sur les autres, où chaque disque de masse infinitésimale dm, radio r et épaisseur dz, a un moment d'inertie donné par:
donnédisque = (½) rdeuxdm
Pour trouver ce différentiel, nous avons simplement pris la formule de la section précédente et remplacé M Oui R pour dm Oui r, respectivement. Un disque comme celui-ci peut être vu dans la géométrie de la figure 5.
En additionnant tous les moments d'inertie infinitésimaux des disques empilés, on obtient le moment d'inertie total de la sphère:
jesphère = ∫dIdisque
Ce qui équivaut à:
I = ∫sphère (½) rdeuxdm
Pour résoudre l'intégrale, vous devez exprimer dm correctement. Comme toujours, il est obtenu à partir de la densité:
ρ = M / V = dm / dV → dm = ρ.dV
Le volume d'un disque différentiel est:
dV = aire de la base x hauteur
La hauteur du disque est l'épaisseur dz, tandis que la surface de la base est πrdeux, donc:
dV = πrdeuxdz
Et en remplaçant dans l'intégrale proposée, cela ressemblerait à ceci:
I = ∫sphère(½) rdeuxdm = ∫ (½) rdeux(ρπrdeuxdz)
Mais avant d'intégrer, il faut observer que r -le rayon du disque- dépend de z et R -le rayon de la sphère-, comme on peut le voir sur la figure 5. En utilisant le théorème de Pythagore:
Rdeux = rdeux + zdeux → rdeux = Rdeux - zdeux
Ce qui nous amène à:
I = ∫sphère(½) ρ rdeux(πrdeuxdz) = ∫sphère(½) ρ π r4dz= ∫sphère(½) ρ π (Rdeux - zdeux)deux dz
Pour intégrer sur toute la sphère, on note que z varie entre -R et R, donc:
Sachant que ρ = M / V = M / [(4/3) πR3] enfin il est obtenu, après avoir simplifié:
Pour cet objet une méthode similaire à celle utilisée pour la sphère est utilisée, mais cette fois c'est plus facile si le cylindre est imaginé formé par des coques cylindriques de rayon r, épaisseur dr et hauteur H, comme si c'étaient les couches d'un oignon.
Le volume dV d'une couche cylindrique est:
dV = 2π.rL.dr
Par conséquent, la masse de la coquille est:
dm = ρ.dV = ρ. 2π.r.L.dr
Cette expression est substituée dans la définition du moment d'inertie:
L'équation ci-dessus indique que le moment d'inertie du cylindre ne dépend pas de sa longueur, mais uniquement de sa masse et de son rayon. Oui L changé, le moment d'inertie autour de l'axe axial resterait le même. Pour cette raison, je du cylindre coïncide avec celui du disque mince précédemment calculé.
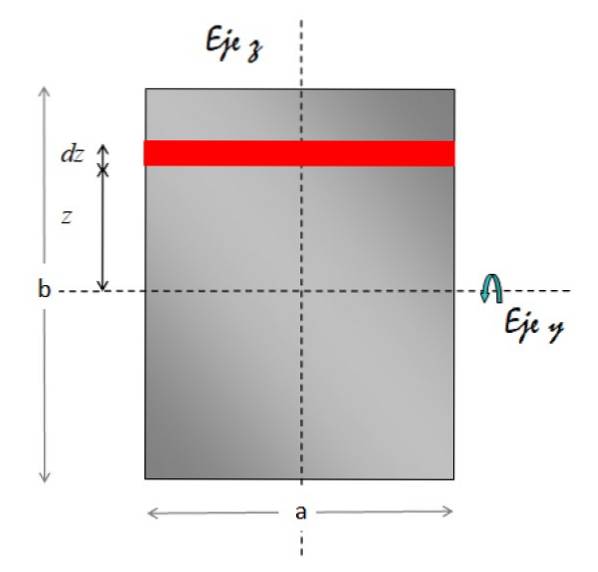
le Axe y axe horizontal de rotation. La figure ci-dessous montre la géométrie requise pour réaliser l'intégration:
L'élément de zone marqué en rouge est rectangulaire. Sa surface est base x hauteur, donc:
dA = a.dz
Par conséquent, le différentiel de masse est:
dm = σ.dA = σ. (a.dz)
En ce qui concerne la distance entre l'élément de surface et l'axe de rotation, il est toujours z. Nous substituons tout cela à l'intégrale du moment d'inertie:
Maintenant, la densité de masse surfacique σ est remplacée par:
σ = M / ab
Et cela ressemble vraiment à ceci:
Notez que c'est comme celui avec la barre fine.
Pour un carré latéral L, dans l'expression précédente valide pour un rectangle, remplacez simplement la valeur de b pour celui de L:
Il existe deux théorèmes particulièrement utiles pour simplifier le calcul des moments d'inertie autour d'autres axes, qui pourraient autrement être difficiles à trouver en raison du manque de symétrie. Ces théorèmes sont:
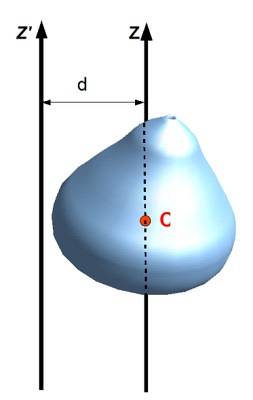
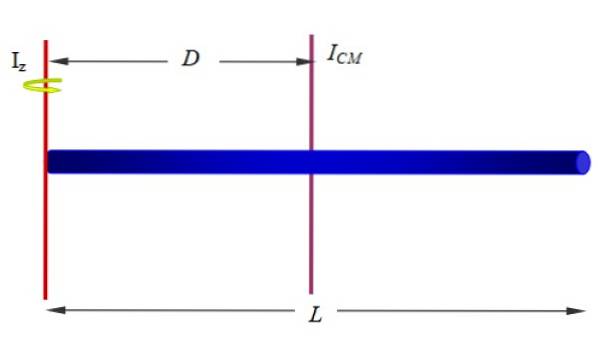
Aussi appelé théorème des axes parallèles, relie le moment d'inertie par rapport à un axe à un autre qui passe par le centre de masse de l'objet, tant que les axes sont parallèles. Pour l'appliquer, il faut connaître la distance D entre les deux axes et bien sûr la masse M de l'objet.
Être jez le moment d'inertie d'un objet étendu par rapport au axe z, ICM le moment d'inertie par rapport à un axe passant par le centre de masse (CM) dudit objet, alors il est vrai que:
jez = JeCM + MARYLANDdeux
Ou dans la notation de la figure suivante: jez ' = Jez + Marylanddeux
Ce théorème est appliqué aux surfaces planes et va comme ceci: le moment d'inertie d'un objet plan autour d'un axe qui lui est perpendiculaire est la somme des moments d'inertie autour de deux axes perpendiculaires au premier axe:
jez = JeX + jeOui
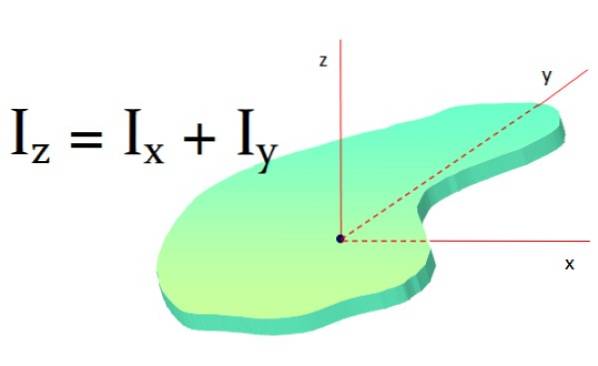
Si l'objet a une symétrie telle que jeX et jeOui sont égaux, alors il est vrai que:
jez = 2IX
Trouvez le moment d'inertie de la barre par rapport à un axe qui passe par l'une de ses extrémités, comme indiqué sur la figure 1 (ci-dessous et à droite) et la figure 10.
Solution:
On a déjà le moment d'inertie de la barre autour d'un axe qui passe par son centre géométrique. Puisque la barre est homogène, son centre de masse est à ce point, donc ce sera notre jeCM pour appliquer le théorème de Steiner.
Si la longueur de la barre est L, l'axe z est à une distance D = L / 2, donc:
jez = JeCM + MARYLANDdeux= (1/12) MLdeux+M (L / 2)deux= (1/3) MLdeux



Personne n'a encore commenté ce post.