le algèbre vectorielle est une branche des mathématiques chargée d'étudier les systèmes d'équations linéaires, vecteurs, matrices, espaces vectoriels et leurs transformations linéaires. Il est lié à des domaines tels que l'ingénierie, la résolution d'équations différentielles, l'analyse fonctionnelle, la recherche opérationnelle, l'infographie, entre autres..
Un autre domaine que l'algèbre linéaire a adopté est la physique, car grâce à cela, il a été possible de développer l'étude des phénomènes physiques, en les décrivant à l'aide de vecteurs. Cela a rendu possible une meilleure compréhension de l'univers.
Index des articles
L'algèbre vectorielle est issue de l'étude des quaternions (extension des nombres réels) 1, i, j et k, ainsi que de la géométrie cartésienne promue par Gibbs et Heaviside, qui ont réalisé que les vecteurs serviraient d'instrument pour représenter divers phénomènes physiques.
L'algèbre vectorielle est étudiée à travers trois principes fondamentaux:
Les vecteurs sont représentés par des lignes qui ont une orientation et des opérations telles que l'addition, la soustraction et la multiplication par des nombres réels sont définies par des méthodes géométriques..
La description des vecteurs et de leurs opérations se fait avec des nombres, appelés composants. Ce type de description est le résultat d'une représentation géométrique car un système de coordonnées est utilisé.
Une description des vecteurs est faite, quel que soit le système de coordonnées ou tout type de représentation géométrique.
L'étude des figures dans l'espace se fait à travers leur représentation dans un référentiel, qui peut être en une ou plusieurs dimensions. Parmi les principaux systèmes figurent:
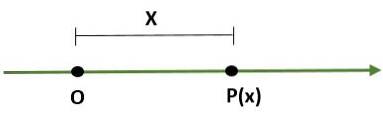
- Système unidimensionnel, qui est une ligne où un point (O) représente l'origine et un autre point (P) détermine l'échelle (longueur) et sa direction:
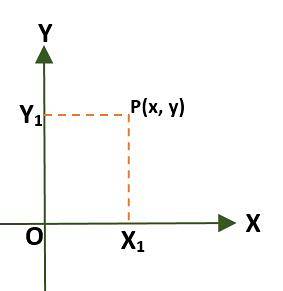
- Système de coordonnées rectangulaire (bidimensionnel), composé de deux lignes perpendiculaires appelées axe x et axe y, qui passent par une origine de point (O); de cette façon, le plan est divisé en quatre régions appelées quadrants. Dans ce cas, un point (P) dans le plan est donné par les distances qui existent entre les axes et P.
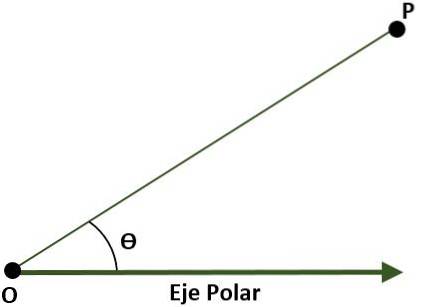
- Système de coordonnées polaires (bidimensionnel). Dans ce cas, le système est composé d'un point O (origine) qui s'appelle le pôle et d'un rayon d'origine en O appelé axe polaire. Dans ce cas, le point P du plan, en référence au pôle et à l'axe polaire, est donné par l'angle (Ɵ), qui est formé par la distance entre l'origine et le point P.
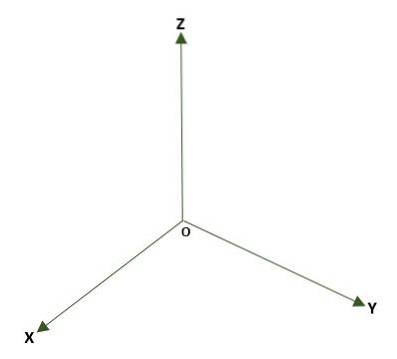
- Système tridimensionnel rectangulaire, formé de trois droites perpendiculaires (x, y, z) dont l'origine est un point O dans l'espace. Trois plans de coordonnées sont formés: xy, xz et yz; l'espace sera divisé en huit régions appelées octants. La référence d'un point P dans l'espace est donnée par les distances qui existent entre les plans et P.
Une grandeur est une grandeur physique qui peut être comptée ou mesurée par une valeur numérique, comme dans le cas de certains phénomènes physiques; cependant, il est souvent nécessaire de pouvoir décrire ces phénomènes avec des facteurs autres que numériques. C'est pourquoi les grandeurs sont classées en deux types:
Ce sont ces quantités qui sont définies et représentées numériquement; c'est-à-dire par un module avec une unité de mesure. Par exemple:
a) Temps: 5 secondes.
b) Masse: 10 kg.
c) Volume: 40 ml.
d) Température: 40 ºC.
Ce sont ces grandeurs qui sont définies et représentées par un module avec une unité, ainsi que par un sens et une direction. Par exemple:
a) Vitesse: (5ȋ - 3ĵ) m / s.
b) Accélération: 13 m / sdeux; S 45º E.
c) Force: 280 N, 120 °.
d) Poids: -40 ĵ kg-f.
Les quantités vectorielles sont représentées graphiquement par des vecteurs.
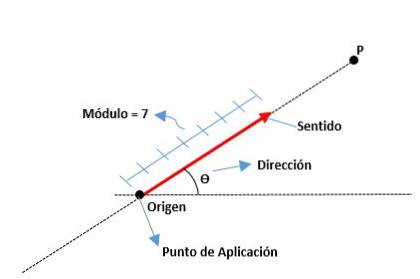
Les vecteurs sont des représentations graphiques d'une quantité vectorielle; c'est-à-dire qu'il s'agit de segments de ligne dans lesquels leur extrémité finale est la pointe d'une flèche.
Celles-ci sont déterminées par sa longueur de module ou de segment, sa direction, qui est indiquée par la pointe de sa flèche, et sa direction selon la ligne à laquelle il appartient. L'origine d'un vecteur est également connue sous le nom de point d'application.
Les éléments d'un vecteur sont les suivants:
C'est la distance de l'origine à la fin d'un vecteur, représentée par un nombre réel avec une unité. Par exemple:
| OM | = | A | = A = 6 cm
C'est la mesure de l'angle qui existe entre l'axe x (du positif) et le vecteur, ainsi que les points cardinaux (nord, sud, est et ouest) sont utilisés.
Il est donné par la pointe de flèche située à la fin du vecteur, indiquant où il va.
En général, les vecteurs sont classés comme suit:
C'est celui dont le point d'application (origine) est fixe; c'est-à-dire qu'il reste lié à un point de l'espace, il ne peut donc pas se déplacer dans ce.
Il peut se déplacer librement dans l'espace car son origine se déplace vers n'importe quel point sans changer son module, sa direction ou sa direction..
C'est celui qui peut transférer son origine le long de sa ligne d'action sans changer de module, de direction ou de direction..
Les principales propriétés des vecteurs sont les suivantes:
Ce sont ces vecteurs libres qui ont le même module, la même direction (ou ils sont parallèles) et le sens comme un vecteur glissant ou un vecteur fixe.
Cela se produit lorsque deux vecteurs ont la même direction (ou sont parallèles), le même sens, et bien qu'ils aient des modules et des points d'application différents, ils provoquent les mêmes effets.
Ceux-ci ont le même module, la même direction et le même sens, même lorsque leurs points de départ sont différents, ce qui permet à un vecteur parallèle de se traduire sans l'affecter..
Ce sont ceux qui ont le même module et la même direction, mais leur sens est opposé.
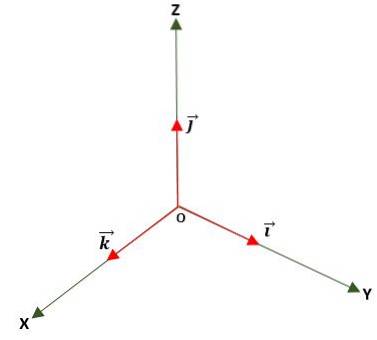
C'est celui dans lequel le module est égal à l'unité (1). Ceci est obtenu en divisant le vecteur par son module et est utilisé pour déterminer la direction et le sens d'un vecteur, soit dans le plan ou dans l'espace, en utilisant les vecteurs unitaires de base ou normalisés, qui sont:
C'est celui dont le module est égal à 0; c'est-à-dire que son point d'origine et sa fin coïncident au même point.
Les composantes d'un vecteur sont les valeurs des projections du vecteur sur les axes du système de référence; En fonction de la décomposition du vecteur, qui peut être sur deux ou trois axes dimensionnels, on obtiendra respectivement deux ou trois composantes..
Les composants d'un vecteur sont des nombres réels, qui peuvent être positifs, négatifs ou même zéro (0).
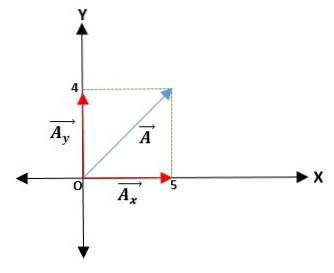
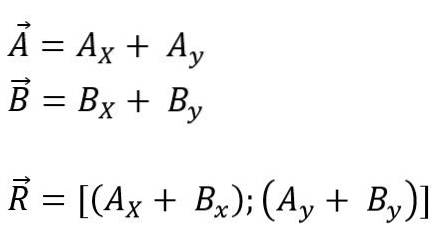
Ainsi, si nous avons un vecteur Ā, d'origine dans un repère rectangulaire dans le plan xy (bidimensionnel), la projection sur l'axe x est Āx et la projection sur l'axe y est Āy. Ainsi, le vecteur sera exprimé comme la somme de ses vecteurs composants.
Nous avons un vecteur Ā qui part de l'origine et les coordonnées de ses extrémités sont données. Ainsi, le vecteur Ā = (ĀX; ÀOui) = (4; 5) cm.
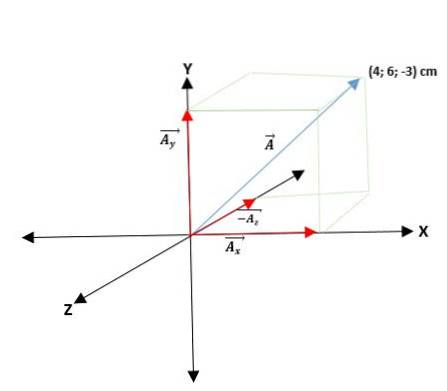
Si le vecteur Ā agit à l'origine d'un repère triangulaire tridimensionnel (dans l'espace) x, y, z, vers un autre point (P), les projections sur ses axes seront Āx, Āy et Āz; ainsi, le vecteur sera exprimé comme la somme de ses trois vecteurs composants.
Nous avons un vecteur Ā qui part de l'origine et les coordonnées de ses extrémités sont données. Ainsi, le vecteur Ā = (AX; ÀY; Àz) = (4; 6; -3) cm.
Les vecteurs qui ont leurs coordonnées rectangulaires peuvent être exprimés en termes de leurs vecteurs de base. Pour cela, il suffit de multiplier chaque coordonnée par son vecteur unitaire respectif, de manière à ce que pour le plan et l'espace elles soient les suivantes:
Pour l'avion: Ā = AXi + AOuij.
Pour l'espace: Ā = AXi + AOuij + Azk.
Il existe de nombreuses quantités qui ont un module, un sens et une direction, comme l'accélération, la vitesse, le déplacement, la force, entre autres..
Ceux-ci sont appliqués dans divers domaines de la science et, pour les appliquer, il est nécessaire dans certains cas d'effectuer des opérations telles que l'addition, la soustraction, la multiplication et la division de vecteurs et de scalaires..
L'addition et la soustraction de vecteurs sont considérées comme une seule opération algébrique car la soustraction peut être écrite comme une somme; par exemple, la soustraction des vecteurs Ā et Ē peut être exprimée par:
Ā - Ē = Ā + (-Ē)
Il existe différentes méthodes pour effectuer l'addition et la soustraction de vecteurs: elles peuvent être graphiques ou analytiques.
Utilisé lorsqu'un vecteur a un module, un sens et une direction. Pour cela, des lignes sont dessinées qui forment une figure qui aidera plus tard à déterminer le résultat. Les plus connus sont les suivants:
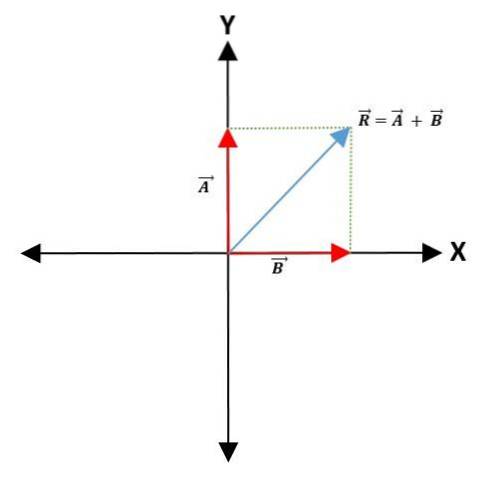
Pour faire l'addition ou la soustraction de deux vecteurs, un point commun est choisi sur l'axe des coordonnées -qui représentera le point d'origine des vecteurs-, en gardant son module, sa direction et sa direction..
Les lignes sont ensuite tracées parallèlement aux vecteurs pour former un parallélogramme. Le vecteur résultant est la diagonale qui va du point d'origine des deux vecteurs au sommet du parallélogramme:
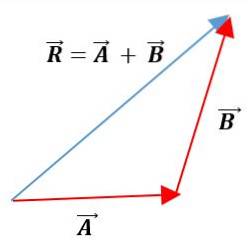
Dans cette méthode, les vecteurs sont placés les uns après les autres, en conservant leurs modules, directions et directions. Le vecteur résultant sera l'union de l'origine du premier vecteur avec la fin du deuxième vecteur:
Deux vecteurs ou plus peuvent être ajoutés ou soustraits par une méthode géométrique ou vectorielle:
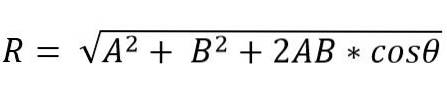
Lorsque deux vecteurs forment un triangle ou un parallélogramme, le module et la direction du vecteur résultant peuvent être déterminés en utilisant les lois du sinus et du cosinus. Ainsi, le module du vecteur résultant, appliquant la loi des cosinus et par la méthode du triangle, est donné par:
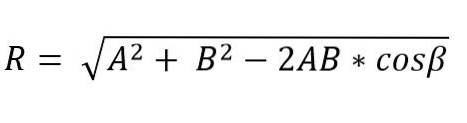
Dans cette formule, β est l'angle opposé au côté R, et il est égal à 180 ° - Ɵ.
Au lieu de cela, par la méthode du parallélogramme, le module du vecteur résultant est:
La direction du vecteur résultant est donnée par l'angle (α), qui forme la résultante avec l'un des vecteurs.
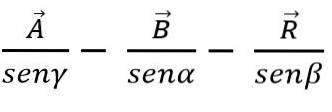
Par la loi du sinus, l'addition ou la soustraction de vecteurs peut également se faire par la méthode du triangle ou du parallélogramme, sachant que dans chaque triangle les côtés sont proportionnels aux sinus des angles:
Cela peut être fait de deux manières: en fonction de ses coordonnées rectangulaires ou de ses vecteurs de base.
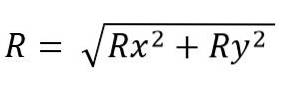
Se puede hacer trasladando los vectores que se van a sumar o restar hacia el origen de coordenadas, y luego se descomponen en sus componentes rectangulares todas las proyecciones en cada uno de los ejes para el plano (x, y) o el espacio (x, et Z); enfin, ses composants sont ajoutés algébriquement. Donc pour l'avion c'est:
Le module du vecteur résultant est:
Alors que pour l'espace c'est:
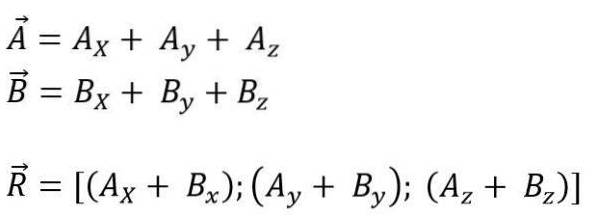
Le module du vecteur résultant est:

Lorsque des sommes vectorielles sont effectuées, plusieurs propriétés sont appliquées, à savoir:
- Propriété associative: la résultante ne change pas lors de l'ajout de deux vecteurs d'abord, puis de l'ajout d'un troisième vecteur.
- Propriété commutative: l'ordre des vecteurs n'altère pas la résultante.
- Propriété distributive vectorielle: si un scalaire est multiplié par la somme de deux vecteurs, il est égal à la multiplication du scalaire par chaque vecteur.
- Propriété distributive scalaire: si un vecteur est multiplié par la somme de deux scalaires, il est égal à la multiplication du vecteur pour chaque scalaire.
La multiplication ou le produit de vecteurs pourrait être fait sous forme d'addition ou de soustraction, mais le faire de cette façon perd sa signification physique et ne se trouve presque jamais dans les applications. Par conséquent, les types de produits les plus utilisés sont généralement le produit scalaire et vectoriel.
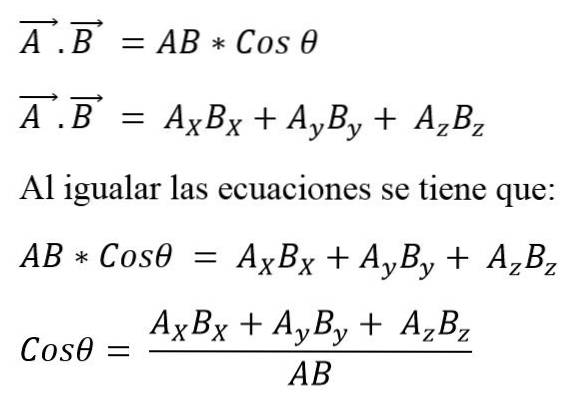
Il est également connu sous le nom de produit scalaire de deux vecteurs. Lorsque les modules de deux vecteurs sont multipliés par le cosinus du plus petit angle formé entre eux, un scalaire est obtenu. Pour exprimer un produit scalaire entre deux vecteurs, un point est placé entre eux, et cela peut être défini comme:
La valeur de l'angle qui existe entre les deux vecteurs dépendra du fait qu'ils soient parallèles ou perpendiculaires; ainsi, vous devez:
- Si les vecteurs sont parallèles et ont le même sens, cosinus 0º = 1.
- Si les vecteurs sont parallèles et ont des directions opposées, cosinus 180º = -1.
- Si les vecteurs sont perpendiculaires, cosinus 90º = 0.
Cet angle peut également être calculé sachant que:
Le produit scalaire a les propriétés suivantes:
- Propriété commutative: l'ordre des vecteurs n'altère pas le scalaire.
-Propriété distributive: si un scalaire est multiplié par la somme de deux vecteurs, il est égal à la multiplication du scalaire par chaque vecteur.
La multiplication vectorielle, ou produit croisé de deux vecteurs A et B, se traduira par un nouveau vecteur C et est exprimée en utilisant un croisement entre les vecteurs:
Le nouveau vecteur aura ses propres caractéristiques. De cette manière:
- La direction: ce nouveau vecteur sera perpendiculaire au plan, qui est déterminé par les vecteurs d'origine.
- La direction: elle est déterminée avec la règle de la main droite, où le vecteur A est tourné vers B, indiquant le sens de rotation avec les doigts, et la direction du vecteur est marquée avec le pouce.
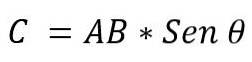
- Le module: est déterminé par la multiplication des modules des vecteurs AxB, par le sinus du plus petit angle existant entre ces vecteurs. Il s'exprime:
La valeur de l'angle existant entre les deux vecteurs dépendra du fait qu'ils soient parallèles ou perpendiculaires. Ainsi, il est possible de déclarer ce qui suit:
- Si les vecteurs sont parallèles et ont le même sens, sinus 0º = 0.
- Si les vecteurs sont parallèles et ont des directions opposées, sinus 180º = 0.
- Si les vecteurs sont perpendiculaires, sinus 90º = 1.
Lorsqu'un produit vectoriel est exprimé en fonction de ses vecteurs de base, on a:

Le produit scalaire a les propriétés suivantes:
- Il n'est pas commutatif: l'ordre des vecteurs modifie le scalaire.
- Propriété distributive: si un scalaire est multiplié par la somme de deux vecteurs, il est égal à la multiplication du scalaire par chaque vecteur.


Personne n'a encore commenté ce post.