
La règle de la main droite est une ressource mnémotechnique pour établir la direction et le sens du vecteur résultant d'un produit vectoriel ou produit croisé. Il est largement utilisé en physique, car il existe des quantités vectorielles importantes qui résultent d'un produit vectoriel. Tel est le cas du couple, de la force magnétique, du moment cinétique et du moment magnétique, par exemple.
Soit deux vecteurs génériques à Oui b dont le produit croisé est à X b. Le module d'un tel vecteur est:
à X b = a.b. dans α
Où α est l'angle minimum entre à Oui b, tandis que a et b représentent ses modules. Pour distinguer les vecteurs de leurs modules, des lettres en gras sont utilisées.
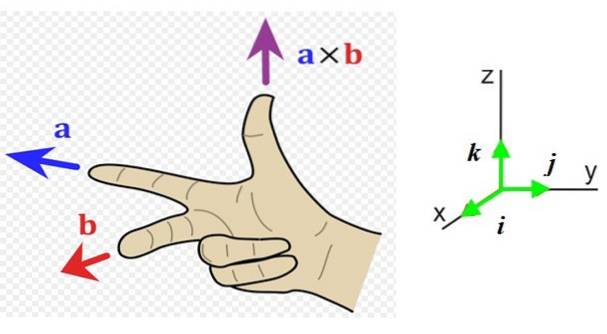
Nous devons maintenant connaître la direction et le sens de ce vecteur, il est donc pratique d'avoir un système de référence avec les trois directions de l'espace (figure 1 à droite). Les vecteurs unitaires je, j Oui k ils pointent respectivement vers le lecteur (hors page), vers la droite et vers le haut.
Dans l'exemple de la figure 1 à gauche, le vecteur à se dirige vers la gauche (direction Oui négatif et index de la main droite) et le vecteur b va au lecteur (direction X positif, majeur de la main droite).
Le vecteur résultant à X b a la direction du pouce, vers le haut dans la direction z positif.
Index des articles
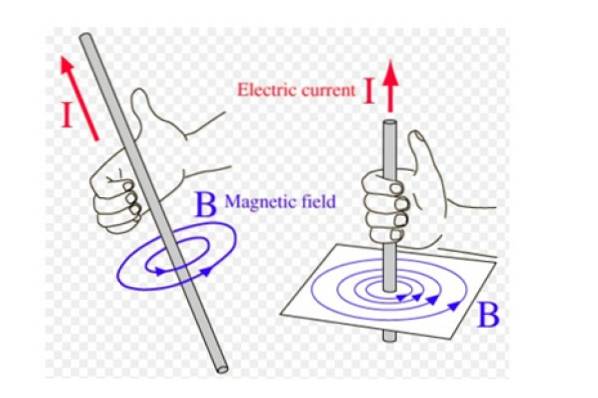
Cette règle, également appelée règle du pouce droit, Il est beaucoup utilisé lorsqu'il y a des grandeurs dont la direction et la direction tournent, comme le champ magnétique B produit par un fil fin et droit qui transporte un courant.
En tal caso las líneas de campo magnético son circunferencias concéntricas con el alambre, y el sentido del giro se obtiene con esta regla de la siguiente forma: el pulgar derecho señala la dirección de la corriente y los cuatro dedos restantes se curvan en la dirección del Campagne. Nous illustrons le concept dans la figure 2.
La figure ci-dessous montre une autre forme de règle de la main droite. Les vecteurs qui apparaissent dans l'illustration sont:
-La vitesse v d'une charge ponctuelle q.
-Champ magnétique B dans lequel la charge se déplace.
-FB la force que le champ magnétique exerce sur la charge.
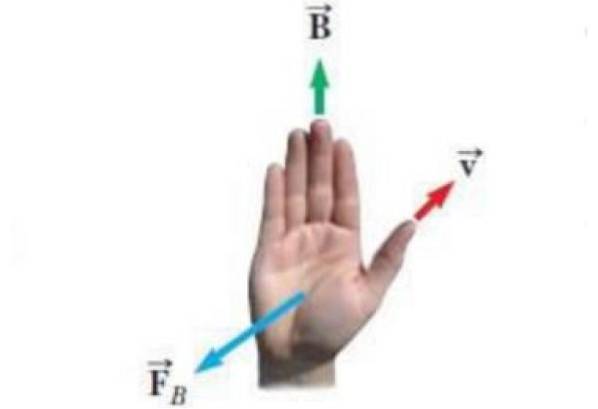
L'équation de la force magnétique est FB = qv X B et la règle de la main droite pour connaître la direction et le sens de FB est appliqué comme ceci: le pouce pointe selon v, les quatre doigts restants sont placés selon le champ B. Puis FB est un vecteur qui sort de la paume de la main, perpendiculairement à celle-ci, comme s'il poussait la charge.
Noter que FB Je pointerais dans la direction opposée si la charge q était négative, puisque le produit vectoriel n'est pas commutatif. En fait:
à X b = - b X à
La règle de la main droite peut être appliquée pour différentes quantités physiques, connaissons-en quelques-unes:
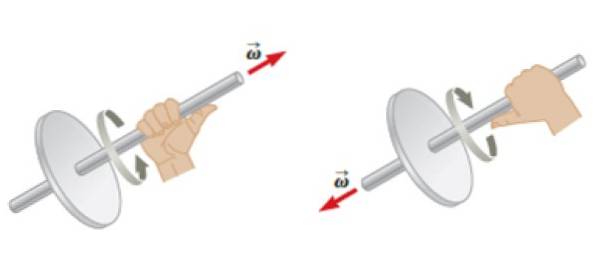
Les deux vitesses angulaires ω comme accélération angulaire α ce sont des vecteurs. Si un objet tourne autour d'un axe fixe, il est possible d'attribuer la direction et le sens de ces vecteurs en utilisant la règle de la main droite: les quatre doigts sont enroulés suivant la rotation et le pouce offre immédiatement la direction et le sens de la vitesse angulaire ω.
De son côté, l'accélération angulaire α aura la même adresse que ω, mais sa signification dépend de si ω augmente ou diminue en ampleur avec le temps. Dans le premier cas, les deux ont la même direction et le même sens, mais dans le second, ils auront des directions opposées..
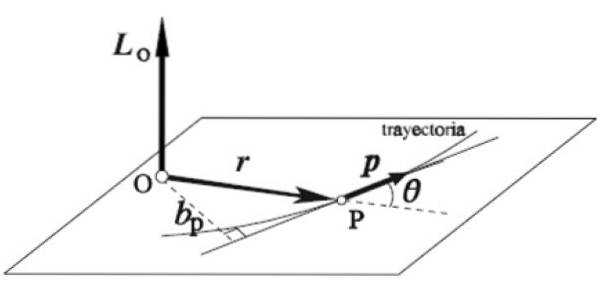
Le vecteur de moment angulaire LOU ALORS d'une particule qui tourne autour d'un certain axe O est défini comme le produit vectoriel de son vecteur de position instantané r et l'élan linéaire p:
L = r X p
La règle de la main droite est appliquée de cette manière: l'index est placé dans la même direction et le même sens de r, le majeur sur celui de p, les deux sur un plan horizontal, comme sur la figure. Le pouce est automatiquement étendu verticalement vers le haut indiquant la direction et le sens du moment cinétique LOU ALORS.
Le sommet de la figure 6 tourne rapidement avec une vitesse angulaire ω et son axe de symétrie tourne plus lentement autour de l'axe vertical z. Ce mouvement s'appelle précession. Décrivez les forces agissant sur la toupie et l'effet qu'elles produisent.
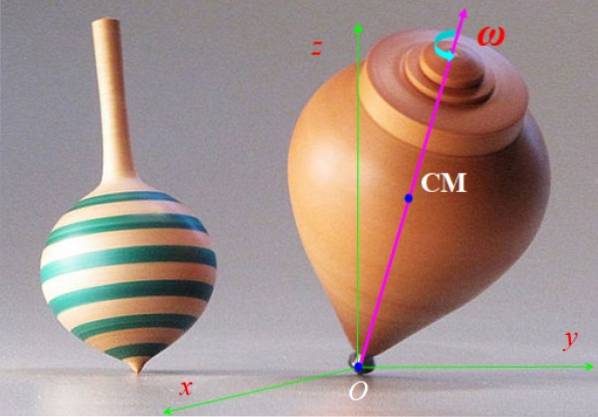
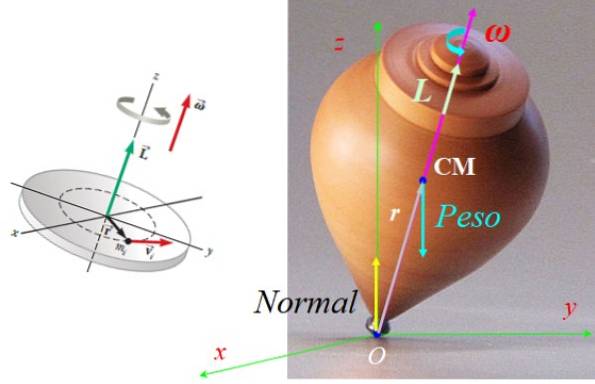
Les forces agissant sur le dessus sont normales N, appliqué sur le point d'appui avec le sol O plus le poids Mg, appliqué au centre de masse CM, avec g le vecteur accélération de la gravité, dirigé verticalement vers le bas (voir figure 7).
Les deux forces s'équilibrent, donc le sommet ne bouge pas. Cependant le poids produit un couple ou un couple τ net par rapport au point O, donné par:
τOU ALORS = rOU ALORS X F, avec F = Mg.
Quoi r et Mg ils sont toujours dans le même plan que le dessus tourne, selon la règle de la main droite le couple τOU ALORS est toujours situé dans l'avion xy, perpendiculaire aux deux r Quoi g.
Noter que N ne produit pas de couple par rapport à O, car son vecteur r par rapport à O est nul. Ce couple produit un changement de moment cinétique qui fait précéder le sommet autour de l'axe Z..
Indiquez la direction et le sens du vecteur moment cinétique L du haut de la figure 6.
Tout point sur le dessus a une masse mje, rapidité vje et vecteur de position rje, lorsqu'il tourne autour de l'axe z. Moment angulaire Lje de ladite particule est:
Lje = rje X pje = rje x mjevje
Étant donné que rje Oui vje sont perpendiculaires, la magnitude de L c'est:
Lje = mjerjevje
Vitesse lineaire v est lié à la vitesse angulaire ω à travers:
vje = rjeω
Donc:
Lje = mjerje (rjeω) = mjerjedeuxω
Le moment cinétique total de la toupie L est la somme du moment cinétique de chaque particule:
L = (∑mjerjedeux ) ω
∑ mjerjedeux est le moment d'inertie I du sommet, alors:
L= Jeω
Donc L Oui ω ont la même direction et le même sens, comme le montre la figure 7.



Personne n'a encore commenté ce post.